IFSR Newsletter 1999 Vol. 18 No. 3/4
IJ Stott and DA Sanders
Department of Mechanical and Manufacturing Engineering,
University of Portsmouth,
Anglesea Road, Portsmouth. UK. PO1 3DJ
ian.stott@port.ac.uk
Tel: 023 92 842562.
Introduction
In the past mobile robotics, sensor systems and artificial intelligence have been used in industrial applications. These systems have at first glance seemed ideally suited for applications in Rehabilitation Technology (RT). In reality the transfer of knowledge between these two fields has proved to be difficult. Inclusion of a human in the loop can cause the inclusion of unpredictable or misleading inputs. The Dynamic Systems Engineering Research Group (DSERG) has been investigating this problem in recent years, specifically the problem of mobility for severely disabled people.
Powered mobility
The access to independent means of mobility has been shown to be an important factor in the level of self-esteem and feeling of well being of a person [Verburg et al (1984)]. Verburg stated that independent means of mobility such as crawling, walking and running are usually acquired in the first two years of life as part of the normal development of a child. At a very early stage of normal development children learn that behaviour and interaction with the environment can be controlled. In the absence of the natural development from crawling to walking, a powered wheelchair can provide a reasonable level of independence.
For the severely disabled, a powered wheelchair can offer an escape from total reliance on others. However the decision to allow a young child to drive a powered wheelchair must be taken very seriously. Badly or recklessly driven wheelchairs could cause injury to the driver and others, and cause considerable damage.
Powered wheelchairs are generally directed using manual controls, often a joystick or switches. Some controllers are programmable to suit the requirements of individuals. The user could indicate a direction with the input device, the wheelchair hopefully moved in the required direction react to the disturbance and correct the trajectory.
Intelligent Mobility Systems
Recent work by the DSERG has investigated the integration of intelligent systems to wheelchair controllers. Intelligent wheelchair systems required the addition of sensor systems and control algorithms that could process information from a user and other sensors and use this information to assist the user [Stott et al (1995)].
Many of the system goals tend to be contradictory. A prime objective of this work was to prevent the wheelchair crashing. The needs and wants of the user have complicated the “simple” task of preventing collisions. For example a user that is or feels in control of a wheelchair will expect the wheelchair to behave exactly as instructed. If a wheelchair system detects a dangerous condition developing it will react to it. The user may feel that the wheelchair does something unexpected and not as instructed. Some intelligent wheelchair systems have attempted to avoid this problem by taking full control from the user for “A to B” journeys [Pruski et al (1992)], or constraining the autonomous operation [Bell et al. (1994) and Sanders et al. (1994)]. A major problem during the design of the control algorithms was to decide when to activate and deliver trajectory modifications to the wheelchair. New work by DSERG is concentrating on the human-machine interface to try to interpret the overall wish of the user – this was the biggest challenge.
Sonar sensors have been widely used on sensor systems for autonomous vehicles [Chang et al (1996)].
An ultrasonic ranging system was selected as it was cheap and robust. It was connected along with the user’s input device to an interface to a simple data mixing system. This was created to interpret the sensor and user information [Stott et al. (1997)]. The new systems were fitted to a wheelchair and tested. The system modified the trajectory to guide the wheelchair through doorways, around obstacles and along corridors [Goodwin et al (1997)]. The sensors limited the accuracy of the system and new systems are currently under investigation. The new systems will apply distributed intelligence to the sensors and an expert system will interpret the information before the controller command signals are modified
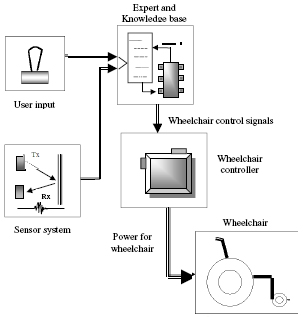
Fig. 1: System Structure, IJ Stott and DA Sanders, IFSR Newsletter 1999 Vol 18 No 3-4 December
Conclusion
The application of state-of-the-art technology to the R.T. field has proved difficult even though many industrial systems have been automated successfully. R.T. applications tend to have “Human-in-the-Loop” systems and this introduces random uncertainties into the system goals. A human expects a system to respond in a predictable manner. The systems must be sympathetic to human needs or it is likely that the user and carers will reject the system.
Bell D., Borenstien J., Levine Sp., Koren Y. & Jaros L. (1994). “An Assistive Navigation System For Wheelchair Based Upon Mobile Robot Obstacle Avoidance”. Ieee Proc. Of Conf. On Robotics And Automation. ( 1994). Pp 2018 – 2022.
Chang C.C. & Song K. (1996). “Sensor-Based Motion Planning Of A Mobile Robot In A Dynamic Environment”. Proc Of The IEEE IECON Int. Conf. On Ind. Equipment.1996. Pp766-771
Goodwin Mj, Sanders Da And Stott Ij (1997). “A Data Fusion Algorithm For Wheelchair Navigation”. Proceedings Of Int Conf On Rehabilitation Robotics (Icorr’97), Bath University, pp 131 – 134.
Pruski A. & Bourhis G (1992). “The Vahm Project: A Cooperation Between An Autonomous Mobile Platform And A Disabled Person”. Proc. of The 1992 Ieee Int. Conf On Robotics And Automation. Pp 268-273.
Sanders Da, Stott Ij, Poland Ga, Tewkesbury Ge, & Cawte H. (1994). “Computer Assistance For A Disabled User/Operator To Navigate A Vehicle Through A Doorway.” Iee Proc. Of 20th Euromicro Conf, Liverpool. Uk. Isbn 0-8186-7127-0, Pp231-238.
Stott Ij, Sanders Da And Goodwin Mj (1995). Improvements In Real Time High-Level Microcomputer Control Of A Wheelchair Using Sensor Systems. Ieee Proc Of 21st Euromicro Conf, Sep 95, Isbn 0-8186-7127-0, Pp 335 – 340.
Stott Ij, Sanders Da, & Goodwin M (1997). “A Software Algorithm For The Intelligent Mixing Of Inputs To A Teleoperated Vehicle”. J. of Systems Architecture 43 (1997) 67 – 72.
Verburg G., Snell E., Pilkington M. & Milner M. (1984). “Effects Of Powered Mobility On Young Handicapped Children And Their Families”. Proc. of 2nd Int. Conf. Of The Rehabilitation Engineering Soc. Of N. America. June 1984. Ottowa. Pp172 – 173.
IFSR Newlsetter 1999 Vol. 18 No. 3/4 December